The researchers of the Salisbury robotics lab undertake a variety of robotics projects in the development of their work. The projects in the Salisbury robotics lab fall under five main categories:
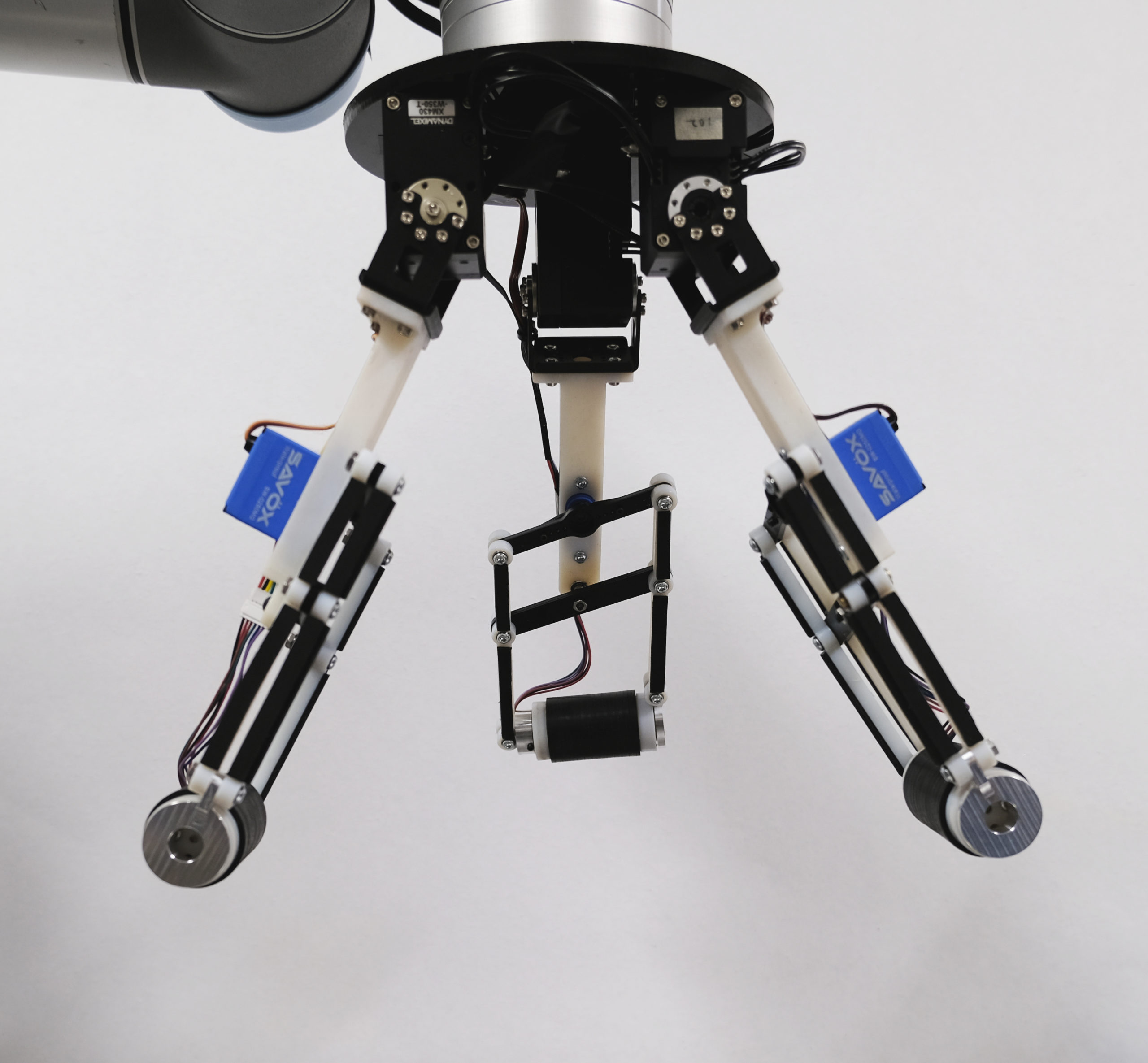
The development of robot graspers for object grasping and in-hand manipulation.
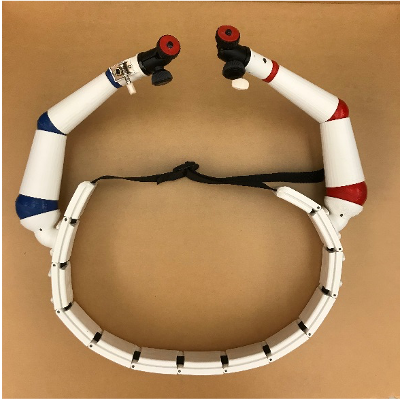
Wearable robotic arm for haptics and daily tasks.

The development of tools, both physical and virtual, that help surgeons plan surgeries and provide medical students with valuable practice.

The development of robots and devices to help practice medicine, such as surgery robots and imaging tools.

The development of hardware and software for haptic feedback, similar to force-feedback control.

The development of robots that operate safely and effectively in human-centric environments such as homes and offices.

The development of systems and devices for personal robots that operate in human-centric environments.