How to add the ARL calendar to your own Google Calendar
- Open the dropdown menu under "Other Calendars" on the left side pane
- Select "Add by URL"
- Copy/paste the following calendar address: http://www.stanford.edu/group/arl/calendar/ical/calendar.ics
- Press "Add Calendar"
Note: This will allow for event viewing but NOT event editing/creation in Google Calendar. Editing/creation of events can be done by logging in to the ARL website.
Last modified Fri, 15 Jan, 2016 at 13:01
ARL JabRef Bibtex
From Shandor's email on the matter:
Hey ARL,
It has come to my attention that many here are unfamiliar with the ARL JabRef. It is a magical tool. JabRef is profound wizardry that enables mere graduate students to manage scores of references with ease, or which the Aerospace Robotics Lab is a humble user.
Yea, follow the directions below, and thou shalt exalt it's powers. This is likely to go on the ARL blog as well.
Shandor
Accessing the Great JabRef
--------------------------
Last modified Wed, 4 Feb, 2015 at 12:45
Adding a paper to the website
Just wanted to put out some instructions for the adding of papers to the website, so that the new folks can do it, and the older folks don't forget. :)
We are each responsible for uploading our own publications, as it is much easier for the person with the original pdf, and sometimes the conferences take forever (if ever at all) to post the documents online.
Last modified Wed, 4 Feb, 2015 at 12:43
Group Talk Order
Sarah Houts
Jose Padial
Marcus Hammond
Ozhan Turgut
Steven Krukowski
David Stonestrom
Aditya Mahajan
Ashley Clark
Last modified Thu, 30 Oct, 2014 at 17:59
GPIO Pin Muxing
I've received a couple new Robovero boards to try out (thanks Gordon). These ones are R3902, unfortunately they still have the same problem with L3 getting in the way of a capacitor on the newer Overo boards but that's supposed to be fixed in R4000. However, they made a couple of changes to the circuitry. One change was the addition of power control over the IMU using one of the Robovero's GPIO pins. Kind of makes sense, lets you power up/down the IMU at will, nice change, easily implemented. The other change was adding a reset circuit to the Overo's GPIO70 pin.
Last modified Tue, 13 Aug, 2013 at 11:00
Full Calibration Procedure
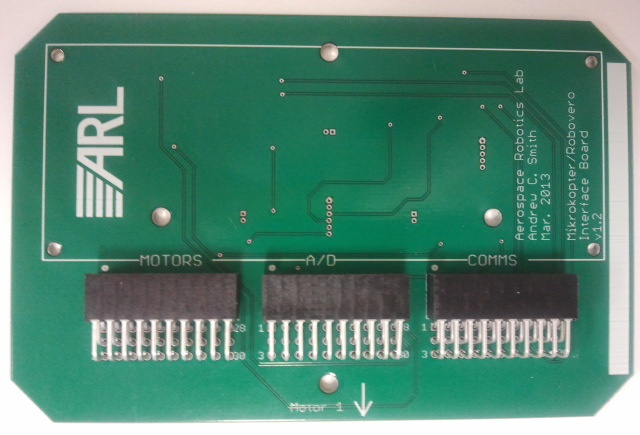
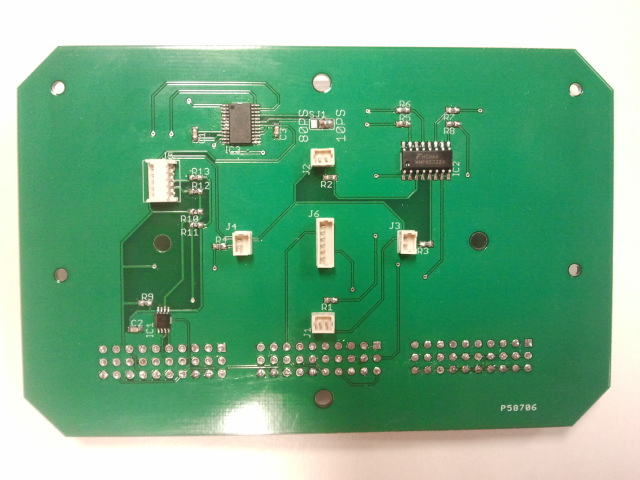
Now that I'm using my new Robovero/Mikrokopter interface board, I figured it was about time that I recalibrated the accelerometer and compass to reflect the new orientation. When I started the recalibration procedure I realized that I never really documented my calibration in the first place. Here's how I did it this time:Accelerometer (roll/pitch)
Last modified Sun, 7 Jul, 2013 at 13:57
I2C Woes
Well after rebuilding my controller build for the Mikrokopter with the new PCB I designed I found out yesterday there was a problem.
Last modified Wed, 22 May, 2013 at 13:16
Getting AUV Code to run in Ubuntu 12.04
Here's a list of some of the things you need to install to get the AUV code working with your 12.04 install
0) Update
sudo apt-get update
1) Install Subversion
sudo apt-get install subversion
2) Install g++, other build software
sudo apt-get build-essential
3) Install PCL
sudo add-apt-repository ppa:v-launchpad-jochen-sprickerhof-de/pcl
sudo apt-get update
sudo apt-get install libpcl-all
4) Download newmat (google it, get the tarball, extract, then copy)
sudo cp -r newmat /usr/local/
cd /usr/local/newmat
sudo make -f nm_gnu.mak
5) Get more stuff
Last modified Tue, 7 May, 2013 at 11:59
Updating Overo Kernel for Multicast Data
Now that I've got my attittude EKF running on the Robovero, it's time to get some position estimates as well. To do that I need to have position measurements. While indoors I'll be using our NaturalPoint OptiTrack system as a pseudo GPS measurement. I already had the Simulink block ready to go so adding that in shouldn't have been a problem. However, when I tried to run the code I was never able to receive any information from the OptiTrack system even though my Windows machine could no problem.
Last modified Sun, 14 Apr, 2013 at 14:52
Compass Calibration and Attitude EKF
After putting it off for a while I finally got around to calibrating the compass on the Robovero. Basically what this does is measure the effects of hard iron (metal objects around the compass), soft iron (circuit effects) and misalignment between the chip axis and the Robovero body axis. To my surprise the compass wasn't too bad, basically wanding around the compass should give a unit sphere centered at 0. It was close but after applying the calibration procedure given in LSM303DLH-compass-app-note.pdf, I came out with the following compass measurements.
Last modified Wed, 27 Mar, 2013 at 18:21